I've seen build vids on youtube, but they often go for hours or miss key steps in the design/layout of cabling, something pretty important on 180mm or less builds, and even generally. So this is an attempt to add value back to the Intertubes.
Firstly the frame is good, it's pretty solid, but the top plate could be a little better or at least the front of the craft could be more solid.
The camera angle is good, but the locking mechanism isn't ideal, and I fully expect it to break and probably break the top plate with it.. The camera I had laying around spare was unfortunately wider than the side shields, so this is adds to the concern and weakness at the front.
Anyway, here's the final product:

Specs:
- LS 180 clone frame from Banggood
- Cobra cm2204-28 KV2300
- Naze32 (legit)
- Littlebee 20A ESCs
- Generic PDB - I would have preferred this one with low-voltage alarms and other goodness, but didn't have a spare one at the time
- Echine 110 FOV FPV Camera - not bad actually, better than my older Fatshark one from HobbyKing
- Echine 200mW VTX kit (not great VTX, but only >25mW I had spare)
- PWM RX (again, all I had laying around, may swap out some of this later)
Of course running Betaflight with BLHeli 14.3 on the ESCs, managed via Cleanflight
Final weight, with props, FPV, VTX antenna, 5cm RP-SMA extender (to avoid VTX damage), lens-cap (forgot), landing-gear (no rubber), and below batteries:
- 432gm running 3S 1300mAh Turnigy nano-tech/a-spec
- 471gm running 4S 1400mAh Multistar/Turnigy Racer

The build:
Package arrives from nextfpv with the final parts needed for the Banggood frame:

Motors go on the frame

Desolder the ESC wires going towards the motors, we'll cut the motor wires and solder those here

ESCs without the motor wires

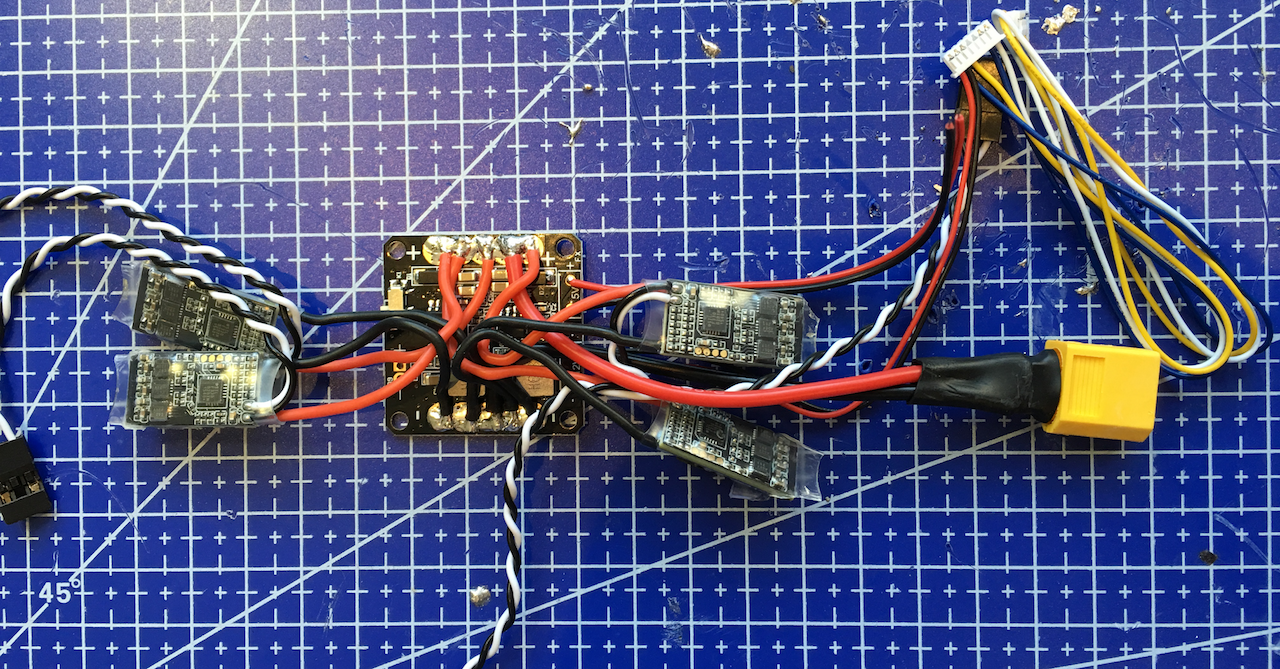
Put the PDB where it will go, and think about the design of your ESC wires and other cabling.
12V at the back for the VTX, LEDs cable will pass through, and the 5V to the FC will just be a little cross-over style cable i'll make later. Note this is the upward view, I flip it (see below)

I like to run the PDB upside down to what i've seen others do, I find you have the space and might as well use it, and it creates a place for airflow between the flight controller and the PDB, and last-minute wires can be put through there if need be

Here i'm basically laying out the ESC wires (which will be flipped along with the PDB), so I can lay them out nicely for a clean and lesser-cable/weight job.

Tin the PDB, when the wires are trimmed short it can get hard in the final stage to get clean solder joints:

Measure and then make a cable, soldering it to the PDB. Below image shows the PDB in the final position upside down:

Solder in your 5V and 12V cables. The 5V is a short link to the FC, and the 12V to the VTX

Now, solder in your ESCs. Note the VTX cable on the RHS.
Now lay it out and check lengths and alignment, make sure you're happy with it.
Be wary of any tricks with the frame, such as the side-walls on the camera (LHS in pick) which forced the ESC wires to be behind the stand-offs, although later I find the camera is to wide to have these in anyway.

Cut/trim and line up your motor wires, then tin them.
In this build on the rear two arms/motors I keep the motor wires a little longer and wrap them over, which you can see in the RHS of the pick, as I plan to reuse these.
The weight is negligible, and the air resistance similar given it won't be flying horizontally/flat.

Motor wires and ESCs soldered and done

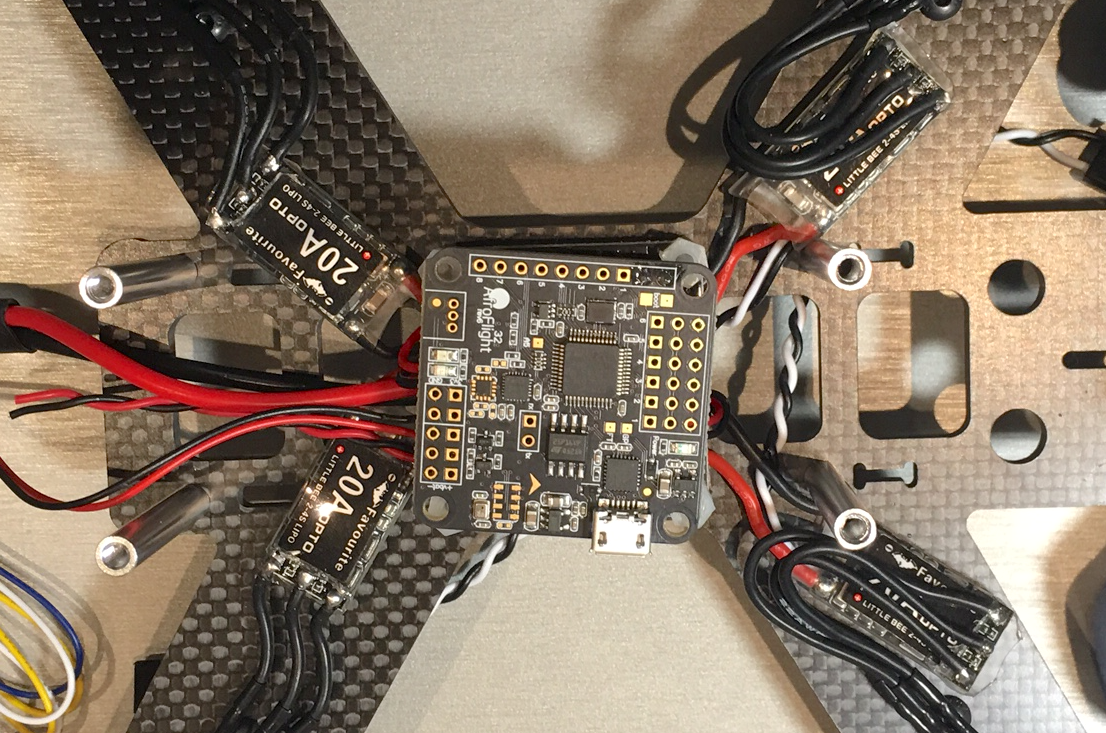
Now I add the Naze32 FC. Notice the top-right of the Naze has two soldered holes. That's typically the RX 5v +/-, but I used it as the cross-over power from the PDB.
Reason is I did this on another build, and it keeps the full 8 power outputs usable. This is a PWM RX as it's all I had at the time
Below shows the PWM RX connected after soldering the pin headers to the Naze.
Black/white are the outputs to the ESCs. I would trim these wires in the next build, and in a racing situation solder directly avoiding the pin headers/extra cabling :>

And the general positioning of the RX once the top plate is screwed on

Now I measured out the VTX cable (I was going to get my minimosd-micro on, but ran out of time), and lightly cable-tied it to the right length. You see this in the next image with a red cable-tie.
Completed build as shown below

There's a few missing steps you say? Correct.. I was in a bit of a rush, so no good/usable pics in the end
But essentially -
I got the camera angle right, fed the RX wires through then screwed in the top plate.
The camera/top-plate holder isn't ideal, so that was key to get right before the VTX etc.
Steps from there, to what you see above:
- Cable-tie the RX
- Position the 5cm VTX antenna-extension. My reasoning for using these is I broke the SMA-connector/solder joint on a A$99 Immersion VTX, twice, because the antenna was directly-wired to the VTX. Given i'm still learning/pushing hard in gaps at full speed etc, this gives me some slack. Besides, the Echine VTX doesn't line up with the hole in this frame, and the antenna SMA joiner doesn't fit in the provided hole in the top-plate :/
- Cable-tie the VTX in place, being conscious of radio/FX interference/heat, and the 5cm joiner lining up neatly without damaging bends
- Cable-tie the 5cm joiner as close as possible to the antenna, to avoid the antenna flipping down one side in to the props. You can see this red tie above the top plate, helping stop the battery sliding back in to the antenna/xt60
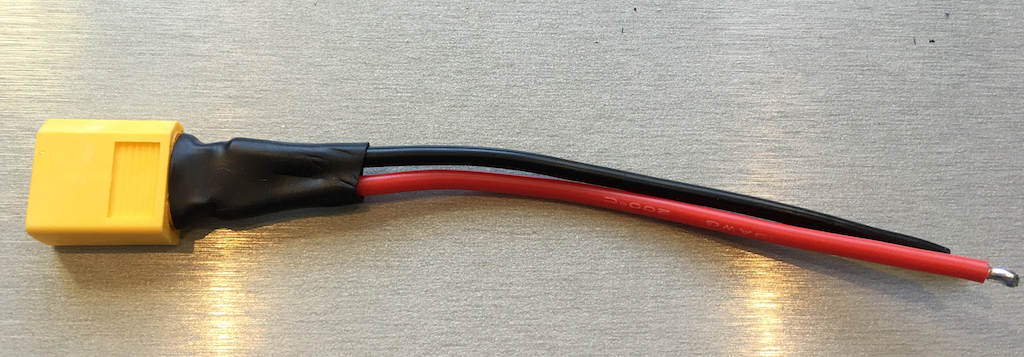
- Place the xt60 connector in it's spot, you could cable-tie this but the battery should limit the risk of it landing in the props.
- Put the fattest/strongest cable-ties along the two sides of the RX wires, then heat-shrink the RX wires inside. I used two colours of heat-shrink, black on the bottom then clear, fwiw
- Cable-tie the ESCs down, I didn't have fat-enough heat-shrink to go around the motors and over the arms, i'll definitely clean this up in the future for aero-dynamic reasons as much as aesthetics
Of course, flash your controller with Betaflight and sync the ESCs.
Then check your motor direction, I got 1/4 on this build, but I just loaded up the BLHeli software using the Cleanflight connector, and adjust the motor direction.
Props on and wire up your battery, time to go outside and get tuning!




No comments:
Post a Comment